
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

स्टेपर मोटर्स र सर्वोस र सर्वो मोटर्स बीचको भिन्नता बुझ्नको लागि लेख
I. स्टेपर मोटर्स र सर्वोस र सर्वो मोटर्स बीचको भिन्नता
स्टेपर मोटर: ओपन-लूप कन्ट्रोल एलिमेन्ट स्टेपर मोटर पार्ट्सको कोणीय विस्थापन वा लाइन विस्थापनमा विद्युतीय पल्स सिग्नल हो। सरल शब्दमा भन्नुपर्दा, यो कोण र मोडहरूको संख्या नियन्त्रण गर्न विद्युतीय पल्स संकेतमा निर्भर हुन्छ। त्यसोभए उसले कति घूर्णन निर्धारण गर्न पल्स सिग्नलमा मात्र भर पर्छ। त्यहाँ कुनै सेन्सर नभएकोले, रोक्ने कोण विचलित हुन सक्छ। यद्यपि, सटीक पल्स संकेतले विचलनलाई कम गर्छ।
सर्वो मोटर: मोटरको गति नियन्त्रण गर्न सर्वो कन्ट्रोल सर्किटमा भर पर्नुहोस्, रोटेशन स्थिति नियन्त्रण गर्न सेन्सर मार्फत। त्यसैले स्थिति नियन्त्रण धेरै सटीक छ। र घुमाउने गति पनि चर छ।
सर्वो (इलेक्ट्रोनिक सर्वो): सर्वोको मुख्य भाग सर्वो मोटर हो। यसमा सर्वो मोटर कन्ट्रोल सर्किट + रिडक्सन गियर सेट समावेश छ। ओहो, सर्वो मोटरसँग रिडक्शन गियर सेट छैन। र सर्वोसँग रिडक्शन गियर सेट छ।
एक सीमा सर्वो को मामला मा, यो रडर हात को स्टीयरिंग कोण निर्धारण गर्न आउटपुट शाफ्ट अन्तर्गत एक पोटेन्टियोमीटर मा निर्भर गर्दछ। सर्वो सिग्नल कन्ट्रोल भनेको पल्स चौडाइ मोड्युलेटेड (PWM) सिग्नल हो, जहाँ माइक्रोकन्ट्रोलरले सजिलै यो सिग्नल उत्पन्न गर्न सक्छ।
II। Stepper मोटर आधारभूत सिद्धान्त
यसले कसरी काम गर्छ:
सामान्यतया मोटरको रोटर स्थायी चुम्बक हो, र जब करेन्ट स्टेटर विन्डिङ्सबाट बग्छ, स्टेटर विन्डिङले भेक्टर चुम्बकीय क्षेत्र उत्पादन गर्छ। यो चुम्बकीय क्षेत्रले रोटरलाई कोणबाट घुमाउन ड्राइभ गर्नेछ, ताकि रोटरको चुम्बकीय क्षेत्रहरूको जोडीको दिशा स्टेटरको चुम्बकीय क्षेत्रको दिशा जस्तै हुनेछ। जब स्टेटरको भेक्टर चुम्बकीय क्षेत्र कोण द्वारा घुमाउँछ। रोटर पनि यो चुम्बकीय क्षेत्र संग एक कोण द्वारा घुमाउँछ। प्रत्येक इनपुट बिजुली पल्सको लागि, मोटरले एक कोणात्मक कदम अगाडि घुमाउँछ। यसको आउटपुट कोणीय विस्थापन इनपुट पल्सको संख्यासँग समानुपातिक छ, र यसको घूर्णन गति दालहरूको आवृत्तिसँग समानुपातिक छ। क्रम परिवर्तन गरेर जसमा विन्डिङहरू ऊर्जावान हुन्छन्, मोटर उल्टो हुन्छ। तसर्थ, पल्सको संख्या र आवृत्ति र मोटरको प्रत्येक चरणको विन्डिङलाई उर्जा दिने क्रमलाई स्टेपर मोटरको रोटेशन नियन्त्रण गर्न नियन्त्रण गर्न सकिन्छ।
गर्मी उत्पादन को सिद्धान्त:
सामान्यतया सबै प्रकारका मोटरहरू हेर्नुहोस्, आन्तरिक फलामको कोर र घुमाउरो कुण्डल हो। घुमाउरो प्रतिरोध, शक्तिले हानि, नोक्सान आकार र प्रतिरोध उत्पादन गर्नेछ र वर्तमान वर्गको समानुपातिक छ, जसलाई प्रायः तामा हानि भनिन्छ, यदि वर्तमान मानक DC वा साइन वेभ होइन भने, हार्मोनिक हानि पनि उत्पादन गर्दछ; कोरमा हिस्टेरेसिस एडी करन्ट प्रभाव छ, वैकल्पिक चुम्बकीय क्षेत्रमा पनि हानि उत्पन्न हुनेछ, सामग्रीको आकार, वर्तमान, फ्रिक्वेन्सी, भोल्टेज सम्बन्धित, जसलाई फलामको क्षति भनिन्छ। तामाको हानि र फलामको हानि तातो उत्पादनको रूपमा प्रकट हुनेछ, यसरी मोटरको दक्षतालाई असर गर्छ। स्टेपिङ मोटरले सामान्यतया स्थिति निर्धारण शुद्धता र टोक़ आउटपुटलाई पछ्याउँछ, दक्षता अपेक्षाकृत कम छ, वर्तमान सामान्यतया ठूलो छ, र हार्मोनिक कम्पोनेन्टहरू उच्च छन्, गति र परिवर्तनको साथ वर्तमान परिवर्तनको आवृत्ति, त्यसैले स्टेपिङ मोटरहरूमा सामान्यतया तातो अवस्था हुन्छ, र स्थिति सामान्य एसी मोटर भन्दा बढी गम्भीर हुन्छ।
III। रुडर निर्माण
सर्वो मुख्यतया एक आवास, एक सर्किट बोर्ड, एक ड्राइभ मोटर, एक गियर रिड्यूसर र स्थिति पत्ता लगाउने तत्व मिलेर बनेको छ। यसको कार्य सिद्धान्त भनेको रिसीभरले सर्वोमा सिग्नल पठाउँछ, र सर्किट बोर्डमा रहेको IC ले कोरलेस मोटरलाई घुमाउन सुरु गर्छ, र शक्ति घटाउने गियर मार्फत स्विङ आर्ममा पठाइन्छ, र एकै समयमा, स्थिति डिटेक्टरले स्थितिमा आइपुगेको छ वा छैन भनेर निर्धारण गर्न सिग्नल फिर्ता पठाउँदछ। स्थिति डिटेक्टर वास्तवमा एक चर प्रतिरोधक हो। जब सर्वो घुम्छ, प्रतिरोधक मान तदनुसार परिवर्तन हुनेछ, र रोटेशनको कोण रेसिस्टर मान पत्ता लगाएर थाहा पाउन सकिन्छ। सामान्य सर्वो मोटर भनेको तीन-ध्रुव रोटरको वरिपरि बेरिएको पातलो तामाको तार हो, जब कुण्डलबाट प्रवाहको प्रवाहले चुम्बकीय क्षेत्र उत्पन्न गर्दछ, र रोटर चुम्बकको परिधिले प्रतिकर्षण उत्पन्न गर्दछ, जसले बारीमा घुमाउने बल उत्पन्न गर्दछ। भौतिकशास्त्रका अनुसार कुनै वस्तुको जडताको क्षण त्यसको द्रव्यमानसँग प्रत्यक्ष समानुपातिक हुन्छ, त्यसैले घुमाउनको लागि वस्तुको द्रव्यमान जति बढी हुन्छ, त्यति नै बढी बल चाहिन्छ। छिटो घुम्ने गति र कम बिजुली खपत प्राप्त गर्नको लागि, सर्भो पातलो तामाको तारबाट बनेको हुन्छ जुन धेरै पातलो होलो सिलिन्डरमा घुमाइन्छ, कुनै पोल बिना धेरै हल्का खोक्रो रोटर बनाउँदछ, र चुम्बकहरू सिलिन्डर भित्र राखिन्छ, जुन होलो कप मोटर हो।
विभिन्न काम गर्ने वातावरणहरू अनुरूप, त्यहाँ वाटरप्रूफ र डस्टप्रूफ डिजाइनहरूको साथ सर्वोहरू छन्; र विभिन्न लोड आवश्यकताहरूको प्रतिक्रियामा, त्यहाँ सर्भोहरूको लागि प्लास्टिक र धातु गियरहरू छन्, र सर्भोहरूको लागि धातु गियरहरू सामान्यतया उच्च-टोर्क र उच्च-गति हुन्, यस फाइदाको साथ कि गियरहरू अत्यधिक भारको कारण चिपिने छैनन्। रोटेशन छिटो र अधिक सटीक बनाउन उच्च ग्रेड servos बल बेयरिंग संग सुसज्जित हुनेछ। त्यहाँ एक बल असर र दुई बल बेयरिङ बीच फरक छ, अवश्य पनि दुई बल बेयरिङ राम्रो छन्। नयाँ FET servos ले मुख्यतया FET (फिल्ड इफेक्ट ट्रान्जिस्टर) को प्रयोग गरिरहेको छ, जसमा कम आन्तरिक प्रतिरोधको फाइदा छ र त्यसैले सामान्य ट्रान्जिस्टर भन्दा कम वर्तमान हानि छ।
IV। सञ्चालन को सर्वो सिद्धान्त
पूर्वाग्रह भोल्टेज उत्पन्न गर्न आन्तरिक सर्किटमा pwm तरंगबाट, सर्भोको प्रभाव प्राप्त गर्नको लागि, भोल्टेज भिन्नता शून्य हुँदा, मोटर रोकिन्छ, ताकि कन्ट्याक्टर जेनरेटरले घटाउने गियर मार्फत पोटेन्टियोमिटरलाई सार्नको लागि ड्राइभ गर्नुहोस्।
सर्वो PWM हरूका लागि प्रोटोकलहरू सबै समान छन्, तर देखा पर्ने नवीनतम servos फरक हुन सक्छ।
प्रोटोकल सामान्यतया: 0.5ms ~ 2.5ms मा उच्च स्तर चौडाइ विभिन्न कोणहरू मार्फत घुमाउन सर्वो नियन्त्रण गर्न।
V. सर्वो मोटरहरूले कसरी काम गर्छ
तलको चित्रले पावर अपरेशनल एम्पलीफायर LM675 सँग बनाइएको सर्वो मोटर कन्ट्रोल सर्किट देखाउँछ, र मोटर एक DC सर्वो मोटर हो। चित्रबाट देख्न सकिन्छ, पावर अपरेशनल एम्पलीफायर LM675 15V द्वारा आपूर्ति गरिएको छ, र 15V भोल्टेज परिचालन एम्पलीफायर LM675 को इन-फेज इनपुटमा RP 1 मार्फत थपिएको छ, र LM675 को आउटपुट भोल्टेज moloserver को इनपुटमा थपिएको छ। मोटर गतिको वास्तविक समय पत्ता लगाउनको लागि गति मापन संकेत जनरेटर संग सुसज्जित छ। वास्तवमा, गति संकेत जनरेटर जनरेटर को एक प्रकार हो, र यसको आउटपुट भोल्टेज रोटेशनल गति को समानुपातिक छ। गति नाप्ने संकेत जनरेटर G बाट भोल्टेज आउटपुट भोल्टेज डिभाइडर सर्किट पछि स्पीड त्रुटि संकेतको रूपमा परिचालन एम्पलीफायरको इन्भर्टिङ इनपुटमा फिड गरिन्छ। स्पीड कमाण्ड पोटेन्टियोमिटर RP1 द्वारा सेट गरिएको भोल्टेज मान R1.R2 द्वारा भोल्टेज विभाजन पछि परिचालन एम्पलीफायरको इन-फेज इनपुटमा थपिएको छ, जुन सन्दर्भ भोल्टेजको बराबर छ।
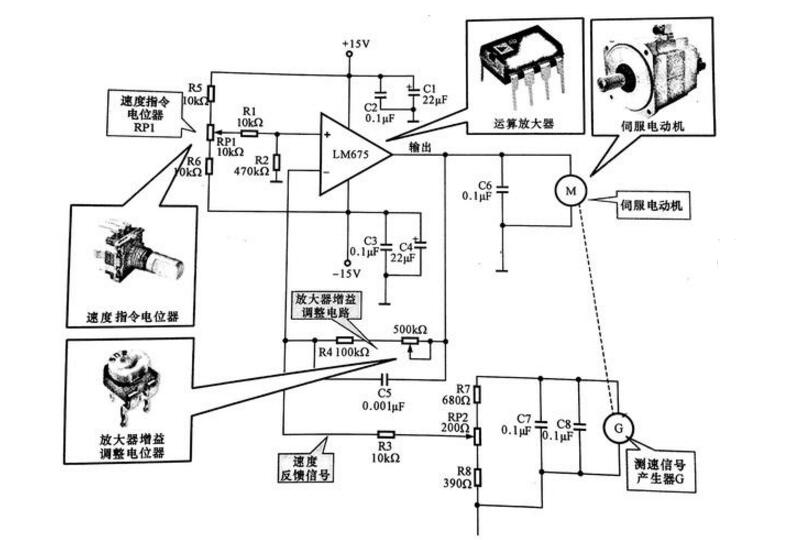
सर्वो मोटरको योजनाबद्ध नियन्त्रण
सर्भोमोटर: सर्वोमोटरको लागि अक्षर M द्वारा संकेत गरिएको, यो ड्राइभ प्रणालीको लागि शक्तिको स्रोत हो। अपरेशनल एम्पलीफायर: सर्किट नाम, अर्थात्, LM675 द्वारा निहित, सर्वो नियन्त्रण सर्किटमा एक एम्पलीफायर टुक्रा हो जसले सर्वो मोटरको लागि ड्राइभ वर्तमान प्रदान गर्दछ।
स्पीड कमाण्ड पोटेन्टियोमिटर RP1: सर्किटमा परिचालन एम्पलीफायरको सन्दर्भ भोल्टेज सेट गर्दछ, अर्थात् गति सेटिङ। एम्प्लीफायर लाभ समायोजन पोटेन्टियोमीटर RP2: क्रमशः एम्प्लीफायर लाभ र गति प्रतिक्रिया संकेतको साइज फाइन-ट्यून गर्न सर्किटमा प्रयोग गरिन्छ।
जब मोटरको लोड परिवर्तन हुन्छ, अपरेशनल एम्पलीफायरको इन्भर्टेड इनपुटमा फिर्ता दिइने भोल्टेज पनि परिवर्तन हुन्छ, अर्थात्, जब मोटरको लोड बढाइन्छ, गति घट्छ, र स्पीड सिग्नल जेनरेटरको आउटपुट भोल्टेज पनि घट्छ, जसले गर्दा इन्भर्टेड इनपुटमा भोल्टेज र अपरेशनल एम्पलीफायरको भिन्नता घट्छ। सन्दर्भ भोल्टेज बढ्छ, र परिचालन एम्पलीफायरको आउटपुट भोल्टेज बढ्छ। यसको विपरित, जब लोड सानो हुन्छ र मोटरको गति बढ्छ, गति मापन गर्ने सिग्नल जेनरेटरको आउटपुट भोल्टेज बढ्छ, अपरेशनल एम्पलीफायरको उल्टो इनपुटमा थपिएको प्रतिक्रिया भोल्टेज बढ्छ, यो भोल्टेज र सन्दर्भ भोल्टेज बीचको भिन्नता घट्छ, आउटपुट भोल्टेज घट्छ, मोमोटरको अपरेशन भोल्टेज घट्छ। तदनुसार, ताकि रोटेशनल गति स्वचालित रूपमा सेट मानमा स्थिर गर्न सकिन्छ।
सोधपुछ पठाउनुहोस्



X
हामी तपाईंलाई राम्रो ब्राउजिङ अनुभव प्रदान गर्न, साइट ट्राफिक विश्लेषण र सामग्री निजीकृत गर्न कुकीहरू प्रयोग गर्छौं। यो साइट प्रयोग गरेर, तपाईं कुकीहरूको हाम्रो प्रयोगमा सहमत हुनुहुन्छ।
गोपनीयता नीति